8. Závěr
o 8.1. Shrnutí
Obdobné zařízení Vixen Polarie Star Tracker
stojí 7500,-. To se na první pohled zdá jako malá úspora, ale pokud se toto zařízení srovná s Vixen
Polarie U Star Tracker, je to už 15000,-. Co se týče nosnosti a funkcí, je vhodnější toto zařízení
srovnávat právě s U Star Tracker či Bresser Mount StarTracker PM-100. Zda je to pro vás cesta či ne,
si musíte rozhodnout sami.
o 8.2. Budoucí
práce
Návrhy na vylepšení a další
rozšíření projektu:
Vyřešit
stabilní napájení pro motor – Stepdown měnič, nastavit na 11 V a sledovat jeho chování
pod prahovou hodnotou. Pokud nebude stabilní, nastavit na 9 V. Prověřit stabilitu napájení
osciloskopem.
Vyměnit tlačítka za lepší a
odolnější verzi.
Zvážit tvorbu aplikace pro
mobil.
o 8.3. Závěrečné úvahy
Možná přidám nějakou kontrolu otáčení,
nějaký enkodér. Nicméně jeho implementace zařízení prodraží, což zrovna u této verze už asi není
záhodno.
9. Přílohy
o 9.1. Zdrojový kód
Kompletní kód s komentáři, platné pro 28BYJ48V a ULN2003. Ke stažení ZDE. Zatím pouze
testovací betaverze. V tomto textu nedostupné. Nutné oprávnění k rozbalení souboru.
Kompletní kód s komentáři, platné pro Nema17 a LDN298N. Ke stažení
ZDE. Zatím pouze testovací betaverze. V tomto textu nedostupné. Nutné oprávnění k rozbalení
souboru.
Odkaz je zaheslovaný. Heslo neposkytuji, slouží
to zde jako úložiště, kdyby něco na mém primárním uložišti selhalo.
K
dispozici po testech budou dvě možnosti. Případným zájemcům jsem ochoten ho nahrát přímo do ARDUINA
za nějakou symbolickou cenu. To bude první možnost a výrazně levnější. V případě poskytnutí výpisu
programu bude cena výrazně vyšší a kopie bude opatřena unikátním ID. To vám umožní přístup k
aktualizacím a technické podpoře z mé strany. Opakuji, vývojem jsem strávil několik desítek
hodin práce, vydal jsem se i špatnou cestou, strávil jsem hodiny a hodiny testováním. To je ta druhá
varianta. Samozřejmě, nikoho nenutím - i tento dokument bez výpisu kódu obsahuje primární informace
o projektu, podle kterých jste schopni si to postavit sami. :D
o 9.2. Zatížení a nosnost, doba
provozu
Níže je hrubý odhad
zatížení (síly), které by výstup na externí převodovce v tomto projektu mohl udržet na rameni
dlouhém 8 cm od středu otočení. Výpočet je velmi orientační, protože přesné hodnoty závisí na
konkrétních parametrech motoru, tření, účinnosti převodů a napájecích podmínkách.
Přibližné údaje:
• Použitý motor: 28BYJ-48
Tento
motor má uvnitř vlastní převod zhruba 64:1, což výrazně zvyšuje jeho výstupní točivý moment oproti
samotnému krokovému motoru.
• Typické uváděné točivé momenty pro 28BYJ-48 po vnitřní převodovce se
často pohybují kolem 0,3 až 0,4 N·m (někde se uvádí i kolem 0,3 N·m držného momentu). To
je hrubý odhad a může se lišit podle kvality motoru, napájení a konkrétního kusu.
• V projektu je za 28BYJ-48
zapojena navíc externí převodovka 10:1. Tato externí převodovka ještě 10x zvýší točivý moment na
výstupu (za cenu snížení rychlosti).
Pokud budeme vycházet z konzervativního odhadu:
• Základní držný moment 28BYJ-48 po vnitřní převodovce: cca 0,034
N·m
• Po přidání externí převodovky 10:1: 0,034 N·m × 10 = 0,34
N·m (hrubý odhad)
Nyní máme
přibližný točivý moment na výstupu: 0,34 N·m
Výpočet síly na rameni 8
cm:
• Rameno r = 8 cm = 0,08 m
• Točivý moment M = F ×
r
• Síla F = M / r = 0,34 N·m / 0,08 m = 4,25 N
4,25 N odpovídá přibližně
hmotnosti:
4,25 N / (9,81 N/kg) ≈ 0,43 kg
Takže při ideálních podmínkách, bez ztrát, by mohlo rameno dlouhé 8 cm
udržet zatížení kolem cca 430 g. Pokud bychom odhadli točivý moment o něco vyšší, např. 0,4
N·m, dostaneme asi 500 g.
Shrnutí:
• Při předpokládaném točivém momentu na výstupu
cca 0,34 N·m by rameno o délce 8 cm mohlo udržet zatížení přibližně 400 gramů.
• Jedná se o hrubý
teoretický odhad, který nezohledňuje účinnost převodů, tření, skutečné držné momenty motoru za
daných provozních podmínek a bezpečnostní rezervy.
V
praxi by zátěž měla být nižší, aby byl zajištěn spolehlivý provoz a aby motor nebyl příliš
namáhán.
Je možné, že tento výpočet je chybný, nevím, zda
udávaná síla motoru je před nebo za interní převodovkou 64:1. Nejsem schopen tuto informaci
dohledat. Vypočet je platný pro před interní převodovkou, takže výsledkem je nejhorší možný scénář.
Při pokusu motor přetížit se přikláním k tomu, že výpočet je za interní převodovkou s vypočítaná
hodnota je správná, tedy cca 400g.
Pokud nebude síla dostačovat, dát Nema17 s vhodným driverem.
V případě použití Nema17 s přídržnou sílou 0,22
by hodnota činila max. 2,8 kg. Pokud by byla nedostačená,
můžete přidat další převodovka. V případě Nema17 jsem zvolil planetární převodovku 99,5:1 z
Aliexpresu.
Doba provozu na
3 baterie 18650 s kapacitou 3200 mA s motorem 28BYJ48
• Pokud je skutečná spotřeba nižší (např.
200 mA), doba provozu se zvýší: = 16 hodin
• Pokud je vyšší (např. 300 mA), doba provozu se zkrátí: ≈ 10,67
hodin
o 9.3. Datasheety komponent
https://blog.laskakit.cz/co-je-arduino-uno-a-jak-s-nim-zacit/
https://www.aksotronik.com.pl/media/products_files/009433.pdf
https://robu.in/wp-content/uploads/2019/12/1.3-Inch-I2C-IIC-OLED-LCD-Module-4pin-with-VCC-GND-Blue-1.pdf
https://www.hadex.cz/spec/m513.pdf
https://components101.com/modules/l293n-motor-driver-module
https://www.gme.cz/v/1507703/hammond-u-ha1455n1602-hlinikova-krabicka
https://dratek.cz/arduino/122929-kfl08-upinaci-lozisko-8mm-s-prirubou.html?gad_source=1&gclid=CjwKCAiAmrS7BhBJEiwAei59i-V2FDd1iiHSEgu7AjaZR6pgglrLJvGvDaL4WPza6PFZgETIyoOXxBoCoKsQAvD_BwE
o 9.4. Fotodokumentace
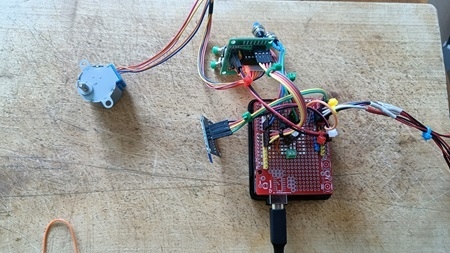
Fotografie jednotlivých fází sestavení a
finálního produktu.
Obr. 1 - sestavení
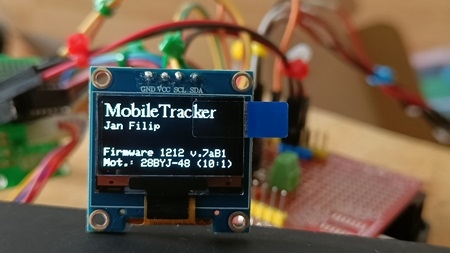
Obr. 2 -
startovací obrazovka
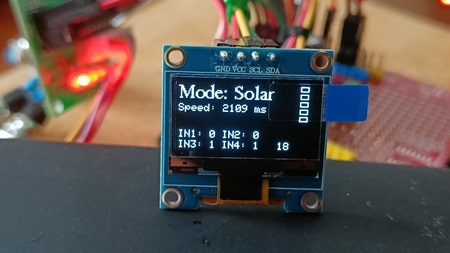
Obr. 3 - pohled na jeden z režimů
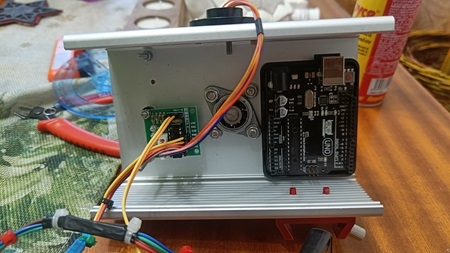
Obr. 4 - počátek
sestavování
Obr. 5 - čelní panel - smontováno
Obr. 6 -
Kontrola rychlosti (čas a úhel)
10. Reference
o Kód jsem vytvořil pomocí AI Cheat GPT. Pro začátky byl použit
model Arduino Expert a Arduino Maestro, nicméně v pozdějších fází projektu jsem musel přejít na O1.
V tomto modelu jsem projekt dokončil. Ostatní modely se ke konci projektu dopouštěly různých
chyb.
o Jako inspirace posloužil Vixen Polarie
Konec druhé části.
Třetí část k dispozici ZDE.