

Úvodem
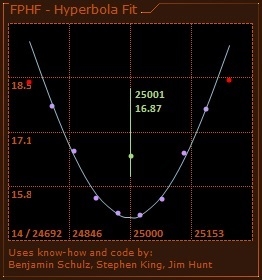
Další alternativou je kontrola hodnot HDF, FWHM nebo při použití programu APT hodnota InvPower. Popisovat rozdíly mezi těmito metodami nebudu, to by zabralo mnoho řádků textu a na internetu se dá bez problémů dohledat, jakým způsobem jednotlivé metody vypočítávají svojí hodnotu. Pro nás je důležité, že hodnota ostření se dá zobrazit na hyperbole, jejíž průběh je zobrazen na snímku níže.
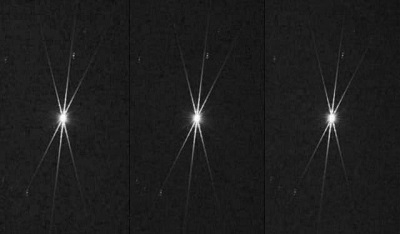
Obr. 2 - zaostření
Samozřejmě při použití tohoto typu ostření se nepoužívá Bahtinova maska, ale provádí se měřením průměru jednotlivých hvězd na snímku - zjednodušeně řečeno. Důležité je, dostat jako výsledný graf právě zmíněnou hyberbolu. Vždy totiž platí, že nejlépe zaostřeno je v místě jejího nejnižšího bodu. A jakou dobu exponovat? Záleží na použité metodě. Zatímco u HDF, FWHM volíme expozici delší, tak aby na snímku bylo pokud možno co nejvíce hvězd, u metody InvPower je expozice v řádu několika sekund a hlídáme, aby hvězda na niž ostříme, nebyla v saturaci. Pokud by se tak stalo, výsledná hyperbola bude vypočítána chybně.
Vrátíme se ale trochu zpět. Máme nějaký graf ostření a co s tím dál? Možnosti jsou dvě. Buďto ostříme ručně dále nebo tuto činnost předáme krokovému motoru. Snažíme se dostat focuser do polohy, která odpovídá nejnižšímu bodu na hyperbole.
Zatímco pokud budeme ostřit manuálně, velikost otočení focusérem je dílem náhody a do správného zaostření se budeme více méně trefovat, pokud zvolíme krokové motory, výsledek by měl být snadněji dosažitelný.
V současné době se pro ostření jako hardware používá zpravidla nějaká verze Arduina nebo ESP 32. Zde se budu věnovat některým focserům právě na bázi Arduina. Nesporná výhoda tohoto řešení je, že výtah s ostřením posuneme o přesně stanovenou hodnotu a při zjištění polohy zaostření se na toto místo dostaneme jednoduchým přejezdem.
A jaká je výhoda toho, že si to postavíme sami? Samozřejmě cena. K celkovým nákladům se vrátím později.
Arduino focuser
Na internetu jsem nalezl několik verzí ostření postavených právě na bázi Arduina. Některé disponovaly externím ovladačem, některé displejem (OLED či LCD), některé byly relativně jednoduchá a některé zase nikoliv. Zde si dovolím malé zamyšlení.
Je opravdu potřeba, aby focuser měl externí ovladač? Nemyslím si. Stejně Arduino máme připojeno k PC a samotný focuser, pokud to není nějaká úplná šílenost, běží pod ASCOMEm či využívá INDI knihovnu v případě Linuxu. Ostření lze bez problémů ovládat tedy počítačem. (Toto platí, pokud fotíme DSLR či CCD technikou - v tom případě nějaký počítač stejně v terénu máme. Pokud však chceme motorizované ostření pro vizuální pozorování, může nám stačit něco úplně triviálního, třeba toto:_dostupné_na_klik).
Dále - potřebujeme OLED displej či LCD? Také si myslím, že nikoliv. Jednotlivé hodnoty, ať již teplota, velikost kroku či pozice motoru - to vše se nám zobrazí v PC. Je pravda, že jsem si také cvičně postavil verzi jak s obyčejným LCD tak i verzi s OLED. Vypadá to dobře, ale je to zbytečnost.
Je třeba, aby focusér měl teplotní sondu? Zde se dostaneme malinko do problémů. Je dobré vědět, jaká je okolní teplota - to bez pochyby. Stejně tak je dobré vědět relativní vlhkost, protože z těchto hodnot se dá vypočítat rosný bod, tj. teplota, kdy se nám může začít mlžit optika. Díky tomu víme, v který okamžik zapnout vyhřívání. Někteří lidé si ale myslí, že když se nám změní teplota, třeba o jeden stupeň, můžou bez vyhodnocení snímku, posunout focuser o určitý počet kroků nějakým směrem. Proč to tak není? Je to jednoduché - to, že venku máme 10 stupňů nám nic neříká o tom, kolik stupňů má vlastní optika. I kdyby ano, musely bychom brát v úvahu i teplotní deformace tubusu. A aby to nebylo úplně jednoduché, může se stát že jedna polovina tubusu má jinou teplotu než druhá - třeba část přivrácená k zemi. Tyto vlivy se dají vysledovat a empiricky zprůměrovat, ale nikdy to nebude zcela přesné. Může se ale stát, že chybovost bude v rámci tolerance pro naši sestavu a tím pádem tu bude fungovat relativně dobře. V opačném případě budete alespoň vědět, proč výsledky nejsou uspokojivé.
Tak teplotní sondu můžeme vynechat? To také ne. Díky ní si můžeme nastavit, že pokud se teplota změní o námi nastavenou hodnotu, spustí se rutina ostření s vyhodnocením snímku. Pak je vše v pořádku. Existuje ale také možnost přeostřovat ne na základě teploty, ale také v čase. Třeba jednou za hodinu a podobně.
Na základě toho, co jsem psal výše, jsem zvolil opravdu jednoduché typy fosuseru. Dva jsem si postavil na Arduino NANO a jeden na Aduino UNO, verze Leonardo.
Ty co jsem postavil na NANu, vyházejí z projektu ARDUFOCUS, ten na LEONARDu PNPfocus._Odkaz_na_oba_projekty_naleznete_níže. Pozor ale na projektovou dokumentaci, jenž uvádí autor. Zapojení u obou projektů zcela přesně neodpovídá, člověk si musí zkontrolovat, na jaké piny má nastaveny výstupy u Arduina. U verze Ardufocus je do konce na webové stránce uvedeno špatné zapojení krokového driveru. Tyto potíže jsem ale zaznamenal i u ostatních projektů. Tyto chyby vznikají zpravidla tak, že se udělá nějaká základní verze a následně se provádí její upgrade, ale ne vždy již proběhne změna i v produktové dokumentaci. Pokud se rozhodnete tedy pro stavbu, myslete i na toto. Autora jsem kontaktoval, tak je možné, že si to již opravili.

Obr. 3 - různé verze ostření - prototyp
Nyní si dovolím pár slov o jednotlivých verzí. Popisovat je budu zleva doprava, přesně jak jsou na obrázku výše.
První a druhý typ je založena na Arduino Nano a spolupracuje s řadiči několika typů, konkrétně A4988, DRV8825 nebo ULN2003. První dva řadiče jsou pro bipolární motory, z niž je velice rozšířen pro tyto účely Nema 17. Tyto motory mají 4 vývody a jejich velkou výhodou je mnohem větší točící síla. Pokud použijeme radič ULN2003 (na obrázku uprostřed), je nutno použít unipolární motor. Pozor na verzi radiče ULN2003. Je pravda, že jsou k sehnání i menší, než je na snímku, nicméně při jejich použití se mě docela dost zahřívaly a docházelo také k zahřívání samotného Arduina. Z toho důvodu různé "mini" verze pro tyto účely nedoporučuji.

Obr. 4 - jeden z "mini" typů ULN 2003
Ostření s ULN2003 má jednu nespornou výhodu a tou je cena motorku. Motor 28BYJ-48 -12V stojí kolem 50,- Kč, což je zlomek ceny Nema 17. Je také mnohem menší a lehčí. Má ovšem díky tomu menší sílu. Pokud je u dalekohledu nainstalován na osu ostření 1:10, může dostačovat. Pokud ho ale použijeme na ose 1:1, jeho výkon v případě těžšího příslušenství s velikou pravděpodobností nebude dostatečný. Svojí funkci plní výborně také na dalekohledu typu Mak či STC. Existuje také verze tohoto motorku pro 5V, nicméně je vhodnější použít 12V verzi.
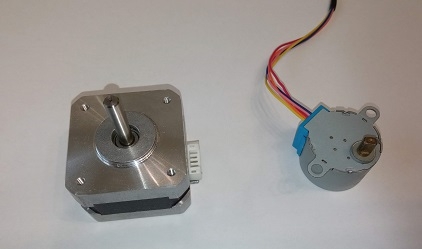
Obr.5 - srovnání NEMA 17 vs 28BJY-48
Jaký motor použít? Pokud máme místo a chceme sázku na jistotu, volil bych Nema17. Pokud ne či nebojím se experimentovat, můžu zkusit 28BYJ-48.
Aby situace byla trochu nepřehlednější, lze motor 28BYJ-48 modifikovat a udělat z něho bipolární motor. To přinese větší točivou sílu, ale pak pro jeho ovládaní nelze použít driver ULN2003, ale musí se použít A4988 či DRV8825.
Modifikace je triviální. Spočívá v sundání krytky, přerušení prostřední cesty na PCB a odpájení prostředního vodiče.
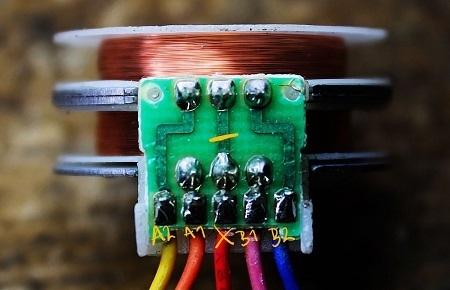
Obr. 6 - modifikace 28BJY-48
Poslední je ostření postavené na LEONARDU. Ta je na sestavení úplně triviální, v podstatě se jedná jenom o zasunutí jedné desky do druhé. Jak jsem se zmínil, je to vlastně veze vycházející z PNP focus. Bohužel na Githubu je u této verze největší zmatek. Ve vlákně se totiž prolínají dvě verze tohoto ostření - jedna na Nanu a druhá na Leonardu. K verzi na Leonardo lze připojit i LCD - nicméně různé shieldy využívají rozdílné piny a je třeba to překontrolovat v programu a provést editaci. Do toho jsem se již nepouštěl, protože mi LCD opravdu přišlo zbytečné.
Co u této verze nemusí být jasné, je připojení teplotní sondy. Kromě klasického VCC, GND je signál konfigurován na pin A2. VCC je na +5V. Měření teploty u této verze probíhá cca 1x za minutu. Pokud dostáváte neplatné hodnoty, zkuste počkat daný interval. Použitý driver pro krokový motor je L298P, tím je předurčen pro bipolární motor (Nema17). Výhoda Leonarda je, že při sériové komunikaci nedojde k resetu linky, není třeba tedy použít kondenzátor 100 uF mezi RST a GND piny Arduina, jako v případě prvních dvou verzí. To má ale za následek jednu problematickou vlastnost. Po připojení na Ascom a zadání povelu o posun focuséru, si dobře rozmyslete délku kroku! Focusér v průběhu pohybu nejde zastavit, komunikace po sériové lince je zpožděna. Pokud bude pohyb prováděn delší dobu, je možné, že se případné přerušení pohybu podaří, ale spoléhat na to nelze. Je to ostatně vidět i na vypisování aktuální pozice focuseru pod ASCOMem. Hodnota se nemění postupně, dojde i k pozastavení programu APT, jenž bude čekat na dosažení zadané pozice. Po jejím dosažením se obnoví komunikace a vše je v pořádku.
Z toho důvodu tuto verzi doporučuji pouze těm, co z nějakého důvodu nemohou pájet či mají obavy ze zapojení předešlých dvou typů.
Vítězem se stává....
Konečné rozhodnutí, která verze je lepší, je v celku jednoduché. Jako nejuniverzálnější volím kombinaci ARDUINO NANO s A4988 či DRV8825. Vyčítání polohy funguje bez problémů, focusér lze kdykoliv zastavit a pokud modifikuji 28BYJ-48 mohu získat kompaktní rozměry i pro použití na Maku či STC.
Na druhé místo dávám typ s ULN 2003. Také funguje zcela spolehlivě, nicméně je pouze pro nemodifikovaný 28BYJ-48. Zapojení je velice jednoduché, pokud stačí výkon motoru, není asi co dále řešit.
Poslední je verze na Leonardu. Její sestavení je opravdu triviální, vlastně se obejdete zcela bez pájení, ale je třeba počítat s omezením, které jsem psal výše.
Další text se týká pouze varinaty s Arduino Nano.
Kalibrace teplotního čidla
K měření teploty je použit NTC 10K zapojený společně s odporem 10K. Vzhledem k tomu, že se odpory vyrábějí s určitou tolerancí, lze na tomto místě v programu zadat jeho reálnou hodnotu.
Samozřejmě doladění je vždy možné i v ASCOMu.
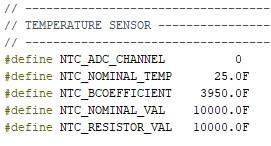
Obr.7 - možnost kalibrace teploty přímo v programu
Držení pozice motoru - motor pod napětím
Pokud je motor pod napětím, nejde s ním pořádně hýbat. To lze využít i jako aretaci. Je nutné ale si to vyzkoušet na stole, radič osadit chlazením a dále kontrolovat teplotu čipu a i motoru. Teplotu lze snížit i zmenšením napětí pro motor. Tuto funkci používat opatrně.
Druhá hodnota určuje, po jaké době se má motor vypnout, v případě, že je tato funkce povolena v kroku výše. Myšlenka je taková, že těch pár sekund stačí na dokončení pohybu focuséru.
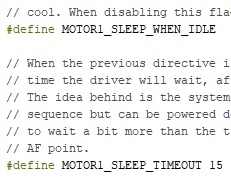
Obr. 8 - vypínání motoru, nastavení
Manipulace - zapojení, odpojení motorů
V zapojení je u napájení krokových radičů použit kondenzátor 47uF, jenž by měl ochránit radič v případě nečekaného odpojení či připojení motoru, pokud bude pod proudem. Moc bych na to ale nespoléhal. Správný postup je tento: připojíme motor, zapojíme focuser do PC a teprve potom zapneme napájení k řadiči. V případě odpojení postupujeme obráceně.
Z toho důvodu komerční výrobky bývají v jednom bloku Arduino + motor, takže motory nelze odpojit.
Pokud se přivede napětí do driveru motoru, bez připojení k PC, může motor vykonat malé otočení náhodným směrem.
Kritická zóna ostření:
Tento pojem nám určuje, v jaké oblasti máme dalekohled zaostřen. V tomto rozsahu by měl být schopen focusér provést několik kroků. Program APT je schopen tento výpočet provést za nás. To, o kolik se nám posune výtah ostření při posunu o jeden krok, jsme schopni změřit podle tohoto návodu: (dostupné_na_klik_zde)
Tato informace je opravdu důležitá, protože díky ní zjistíme, kolik kroků motorem jsme schopni udělat právě v zóně ostření. Pokud uděláme příliš málo kroků, správnou pozici zřejmě přejedeme a zaostření nebude zcela přesné. Pokud bude příliš mnoho kroků, výsledek budou ovlivňovat atmosférické podmínky.
Například - u mého dalekohledu Photoline 80/560 s použitým rovnačem x0,79 a v kombinaci s DSLR 1000D, je moje CFZ 83 micronů. Tuto hodnotu vydělím číslem, které udává vzdálenost, o kterou se posunul focuser v jednom kroku. Výsledné číslo vynásobím 1,5 - 2x, čímž dostaneme hodnotu, kterou dosadím do hodnoty pro jeden krok pro zaostření.
Konkrétně jsem zjistil, že u mého dalekohledu se při pohybu o 500 kroků, posune focuser o 1,40 mm. Je vhodné použít více měření. Je také důležité, aby se při měřeni pohyboval výtah pouze jedním směrem. Jinak si do vypočtu zanesete chybu způsobenou vůlí výtahu.
Vzorec je tedy:M = ((P2 - P1)/500) * 1000.
Dále je to už jednoduché. CFZ : M = počet kroků v CFZ
Počet kroků v CFZ * 1,5 = velikost kroku pro zaostření
Má hodnota je tedy 2,8 mikrometru na 1 krok motorku. Z toho plyne, že velikost kroku pro zaostření činí 45-60.
Jestliže nechceme kvůli výpočtu CFZ instalovat APT, lze výpočet provést online - na stránce: ZDE - dostupné na klik.
Hardware:
Co nemusí byt zřejmé, je důležité použít ochranu proti případné vlhkosti. Já jsem použil tekutou izolační pásku a tou jsem přetřel cely PCB i s Arduinem. Sice to nevypadalo moc esteticky, ale vlhkosti se bát nemusím.
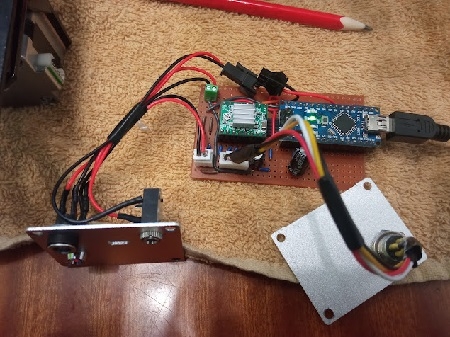
Obr. 9 - před použitím tekuté izolace
Pro přenos krouticího momentu jsem použil spojku, jenž je na snímku níže. Uvidím, jak si povede při výpočtu vůle. Pokud bude problematická, mohu použít celou z hliníku.
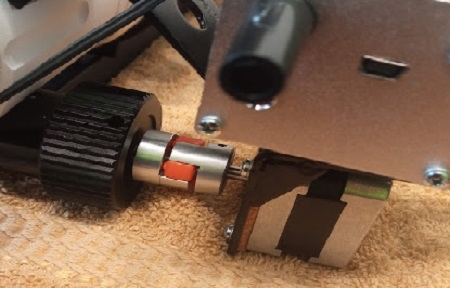
Obr.10 - spojka
Výpočet vůle
Každý výtah má nějakou vůli. Ta se musí v případě použití krokového motoru kompenzovat.
S vůlí se ale pojí další možné potíže. V současné době se hojně používá výtahy typu Crayford, s ostřeném 1.10 a jsou uváděné jako bezvůlové. Problém ale je, že přenos točivé síly z pastorku na ozubenou lištu výtahu není řešen přímo, ale přenáší se třením, jehož síla se nastavuje přítlakem teflonových destiček. To má za výhodu, že pokud se výtah dostane do mezní polohy, tak nedojde k poškození ozubeného převodu. Problém ale nastává v tom, že toto řešení není bezvůlové a to ať s výrobce říká, co chce. Vždy dojde při potočení ostření k malému prokluzu. Velikost tohoto prokluzu je větší, čím máte nastaven větší přítlak a těžší vybavení. Menší nebo větší prokluz také nastává v okamžiku, kdy máte výtah plně naložen a on míří k zemi. I v tomto případě může dojít (a obvykle i dochází) k samovolnému pohybu jehož velikost je ovlivněna zatížením, přejezdy, teplotou, velikostí přítlaku a podobně. Všechny focuséry s tím v programu počítají a vždy se dá do nastavení vložit položka vymezení vůle, ale je dobré si uvědomit, že tato hodnota se vlastně skládá ze dvou veličin. První je výše uvedený prokluz a ta druhá je fyzická vůle mezi převody, tj. jak moc přesně na sebe dosedají jednotlivé ozubené převody. Do této kategorie spadá i vůle, kterou má samotný krokový motor.
Proč to zmiňuji? V některých případech vám výše uvedené zcela zabrání využít funkci automatické ostření. Bohužel toto je věc, která se nedá do předu moc nasimulovat a ani odhadnout. Ideální by bylo, kdyby výtah měl přímý hřebenový posun - což se dnes již moc nevidí, nebo výtah změnit na typ nerotační helical. Tím je po problému. Bohužel toto řečení (helical) již vyžaduje hodně individuální mechanické řešení a musí se dělat vždy na míru, což klade i určité nároky na uživatele.
A jak tedy vypočítám vůli? Já ji stanovil empiricky s Bahtinovou maskou. Provedl jsem zaostření na hvězdě a provedl měření. Následně jsem zkusil pohnout ostřením o předem definovaný krok. Pokud se hodnota ostření výrazně nezměnila, hodnotu vůle mohu zvětšit. v opačném případě zmenšit. Vždy ale při ostření dokončujte pohyb focuséru směrem dovnitř. Jde o to, aby jednotlivé převody byly v záběru a do hry vstupovala hlavně pouze chyba způsobená jemným prokluzem. Také bude užitečné nastavit vůli, která vzniká při změně směru v ostření. Tím je myšleno, že pokud přejedu ostřící bod a následně se vrátím, tak v tomto případě je hodnota vůle určená hlavně chybou v převodech. Obě tyto hodnoty je vhodné vyzkoušet předem. Znova ale pozor, opravdu pohyb ostření dokončujte směrem dovnitř! Ušetříte si tak přemýšlení, proč po zaostření dojde v relativně krátkém čase k rozostření, která není závislé na teplotě ani jiných mechanických věcech.

Obr. 12 - pohled z předu
Odhad ceny - součástky:
Arduino Nano s A4988 či DRV8825, volitelně ULN 2003
V případě použití klonu Arduina se cena součástek bude pohybovat v rozmezí 500-600,- Kč. V tomto odhadu není zahrnuto poštovné, krabička, motor a spotřební materiál (indikace zapnutí, konektor 12V, konektor pro zapojení motoru, krabička). Pokud se použije originál Nano, cena se zvýší o cca 300,-. Při použití AL krabičky, jenž je na fotce, cena vzroste o cca 400,- Kč.
Arduino Leonardo
Zde cena vychází mnohem výše, kolem 1000,- . Lze ji snížit objednáním z Aliexpresu apod. V tomto odhadu není zahrnuto poštovné, krabička, motor a spotřební materiál (indikace zapnutí, konektor 12V, konektor pro zapojení motoru, krabička)
Krabička: na klik ZDE
Arduino Nano: na klik ZDE
GX 12 mm 1x2pin, 1x4pin nebo 5 pin, dle motorku: na klik ZDE
A4988: na klik ZDE
ULN 2003: na klik ZDE
Motor 28BYJ-48 DC 5v nebo12V: na klik ZDE
Nema 17: na klik ZDE, propojovací kabel: na klik ZDE
Vypínač 8 mm, 12V, Fixed: naklikZDE
NTC 10K: na klik ZDE
PCB: na klik ZDE
Kondenzátor 100nF >12V: na klik ZDE
Odkazy:
Ardufocus:
PNP focus:
https://www.cloudynights.com/topic/594658-pnp-focus-the-simplest-ever-arduino-focus-controller/
Arduino IDE:
https://www.arduino.cc/en/software
Ascom driver Ardufocus:
https://github.com/jbrazio/ardufocus-ascom/releases
MoonLite:
https://focuser.com/downloads.php
APT:
https://www.astrophotography.app/
Online výpočet CFZ:
https://www.wilmslowastro.com/software/formulae.htm
Změření délky posunu ostření v 1 kroku:
| návštěvníků stránky | |
|---|---|
| celkem | 264 798 |
| tento týden | 456 |
| dnes | 156 |
